How to Store and Manage Robotics Data
· 12 min read



Robots generate massive amounts of data, and managing it well is harder than it looks. Storage fills up fast, cloud transfer gets expensive, and real time ingestion is unforgiving when you're running cameras and sensors at high frequency.
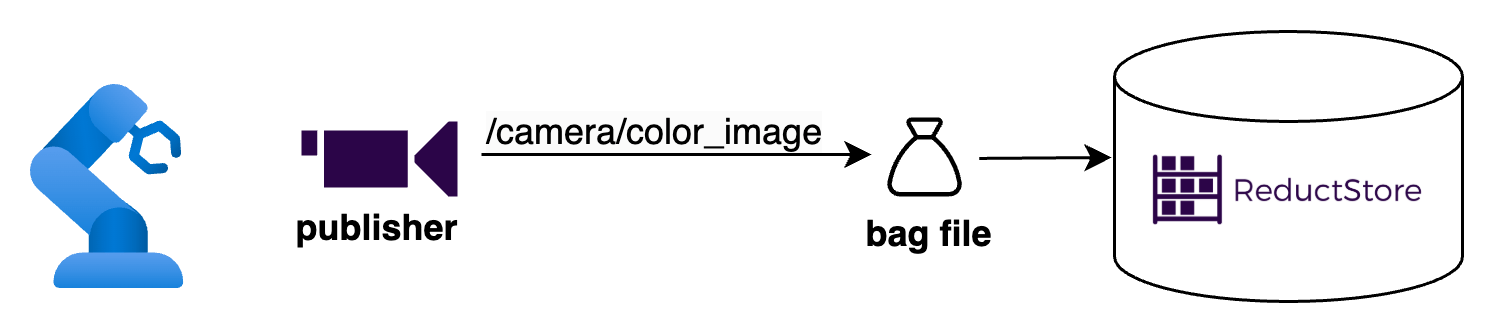
This article covers practical strategies for handling robotic data, introduces ReductStore, and walks through a hands on example. Along the way, we cover native ROS integration, Grafana dashboards, MCAP export for Foxglove, a Zenoh API, and native S3 and Azure backends. We also compare ReductStore against Rosbag and MongoDB so you can pick the right tool for each part of your stack.