How to Persist Zenoh Data

If you're running Zenoh, whether as rmw_zenoh in ROS 2 or as the transport between a robot, a gateway, and the cloud, you'll eventually run into the same question:
"Where does this data actually go? I need to replay yesterday's run, debug a fault from a remote robot, and pull a few thousand frames for training."
There's plenty of material on the communication layer itself: pub/sub primitives, how Zenoh compares to DDS, multi-node setups down to a Raspberry Pi. rmw_zenoh reached Tier-1 status starting with ROS 2 Kilted Kaiju, and it's getting real attention at events like ROSCon.
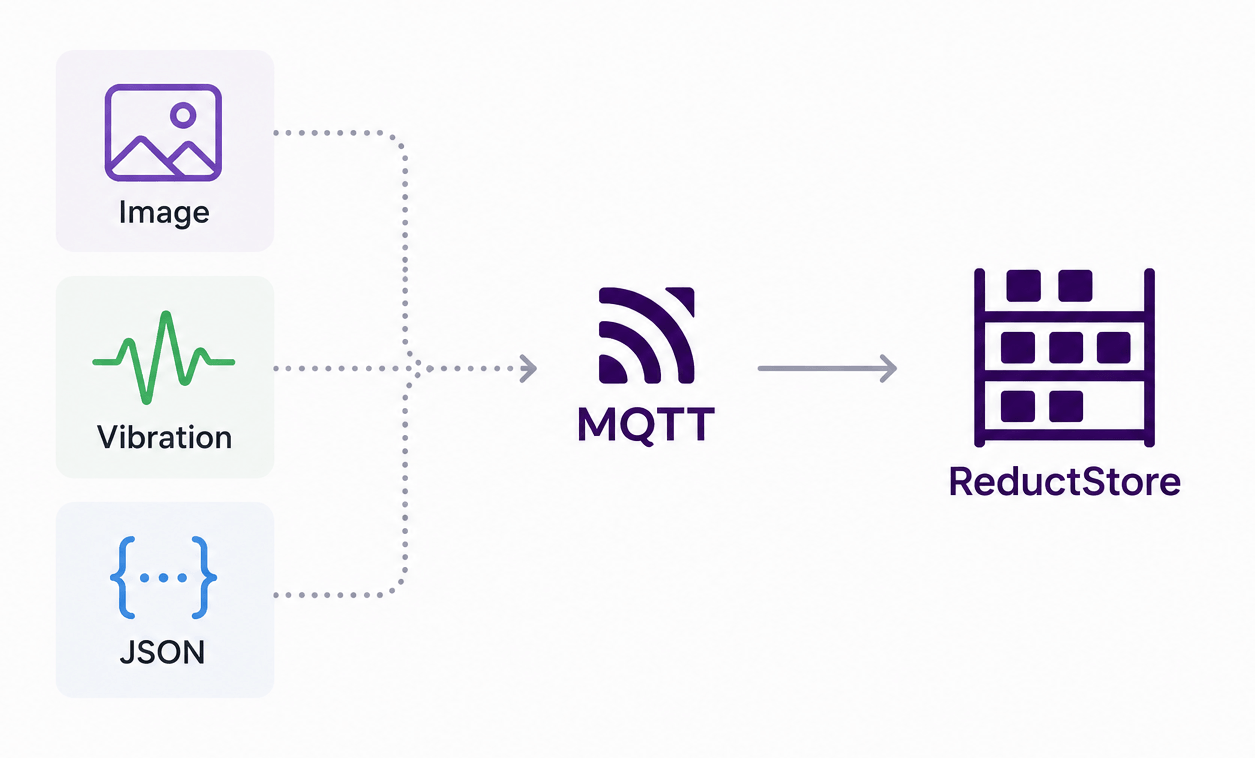
What's harder to find is the next layer: what happens to a sample after it's published. Connecting a live Zenoh network to something persistent and queryable usually means working around the limits of Zenoh's existing storage options.
This post shows another way. By the end you'll have a Python publisher sending data over Zenoh, a storage backend persisting it automatically, and a query client pulling exact time ranges back out, all without a custom backend or a bridge process.